Cedric Perauer
Computer Vision/ML Engineer

Hello, I’m Cedric. I am interested in scene understanding and generation. I am currently working as computer vision/ML Engineer at Hexagon. Previously, I was a master’s student at TUM and did my thesis with Dr. Alexey Artemov at the TUM Visual Computing & AI Lab. I also worked on computer vision for robotics at Apple , automated driving at Bosch and Mercedes and was a founding computer vision engineer at CombatIQ (where I shipped real time computer vision models for UFC fights). I am passionate about bringing the latest research into products and working on the full stack from product driven research to runtime optimization/deployment of models. I enjoy reimplenting papers and following the latest research both at work and in my free time.
Selected Publications
-
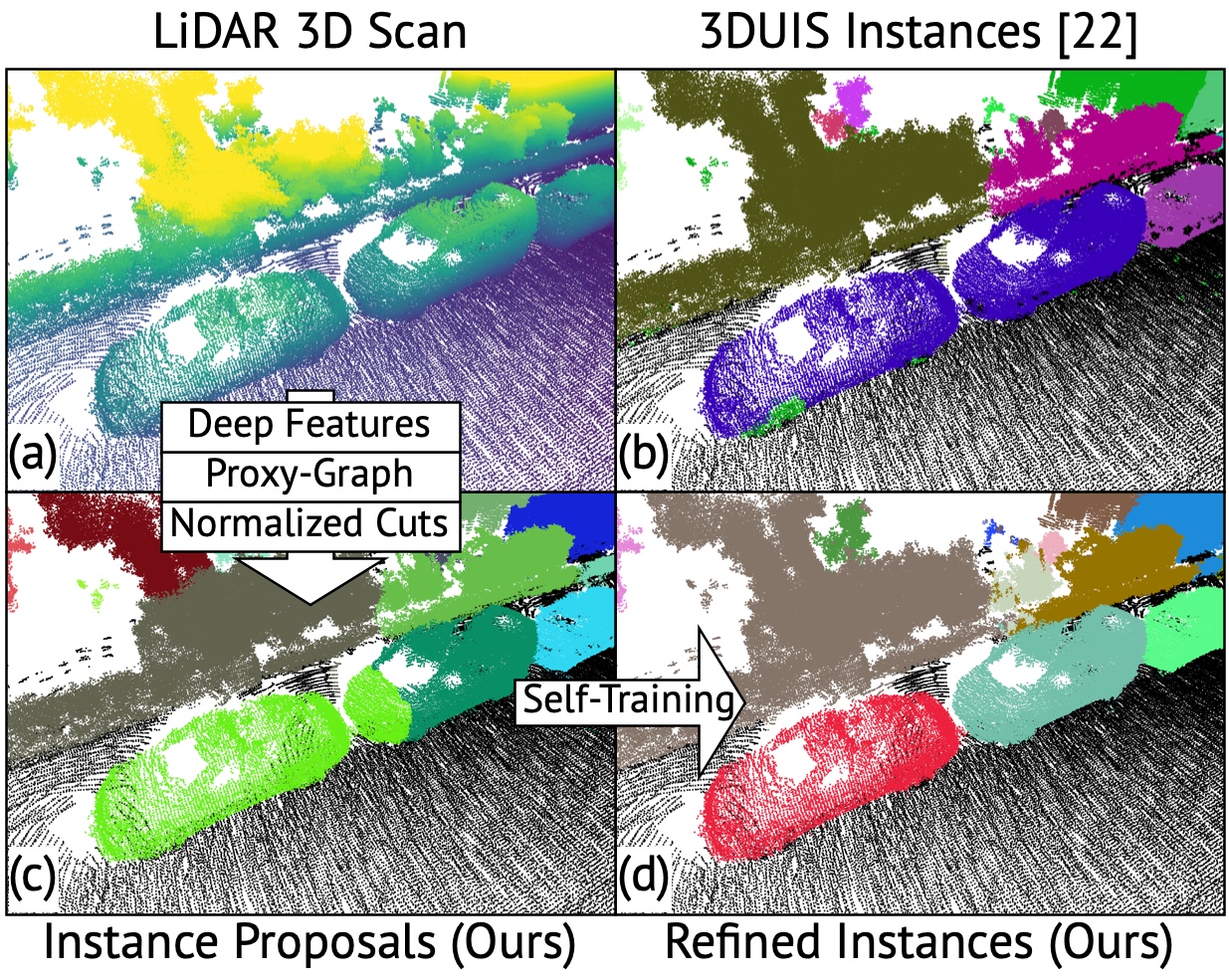 AutoInst: Automatic Instance-Based Segmentation of LiDAR 3D ScansIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
AutoInst: Automatic Instance-Based Segmentation of LiDAR 3D ScansIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Selected Projects
-
 An implementation of the 2026 Bytedance & UCLA paper LoL
An implementation of the 2026 Bytedance & UCLA paper LoL -
 Instance aware real-time dynamic 3D gaussian splatting on Apple devices, based on my friend's (Li et al.) paper TRASE [3DV 2026]
Instance aware real-time dynamic 3D gaussian splatting on Apple devices, based on my friend's (Li et al.) paper TRASE [3DV 2026] -
 2D latent generative anamorphoses with Stable Diffusion 3.5, inspired by LookingGlass (CVPR2025)
2D latent generative anamorphoses with Stable Diffusion 3.5, inspired by LookingGlass (CVPR2025) -
 Progressive inpainting via equirectangular projection based on Meta's 2025 ICCV paper "A recipe for generating 3D worlds from a single image"
Progressive inpainting via equirectangular projection based on Meta's 2025 ICCV paper "A recipe for generating 3D worlds from a single image" -
 Inpainting implementation for Nvidia SANA [ICLR2025] using masked Flow scheduler
Inpainting implementation for Nvidia SANA [ICLR2025] using masked Flow scheduler